projects
research directions organized around robust transportation intelligence.
My research can be organized into four connected directions. They all study how learning systems behave when transportation data are sparse, shifted, safety-critical, or generated by interacting agents.
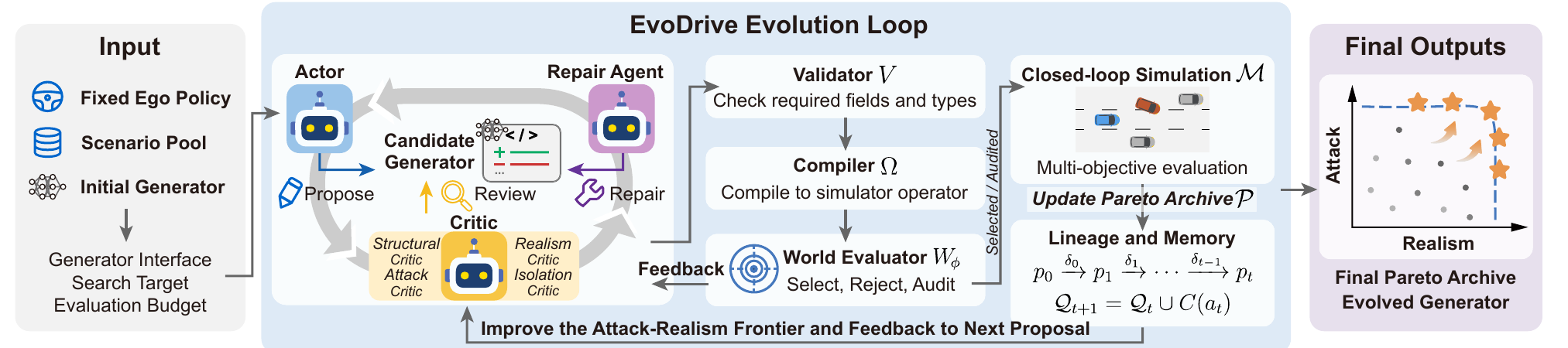
Safe Autonomous Driving
I study how to generate, search, and use realistic safety-critical traffic scenarios before autonomous driving systems are deployed. The goal is not only to find failures, but also to convert adversarial cases into training signals that improve long-tail robustness.
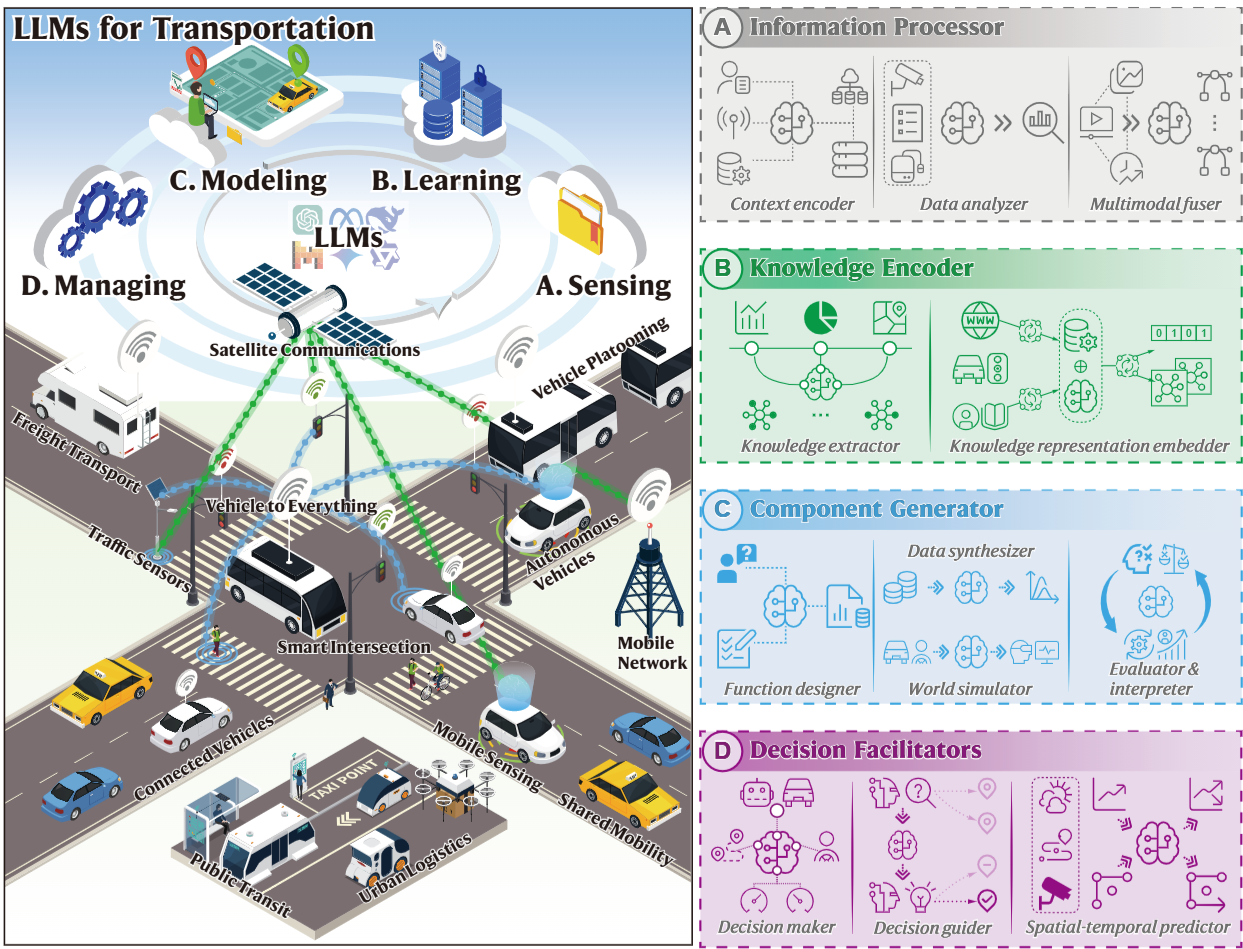
LLM Agents for Mobility
I am interested in language models as a new computational layer for transportation: they can encode geospatial semantics, synthesize realistic mobility records, support demand modeling, and coordinate agentic search in complex simulators.
- LLM4TR: a survey, framework, and roadmap for LLMs in transportation systems.
- MobEvolve: self-evolving heuristic agents for interpretable human mobility generation.
- LLMSynthor: macro-aligned micro-record synthesis with LLMs.
- LLM2GeoVec and LLM4Delivery: geospatial representations and LLM-empowered demand modeling.
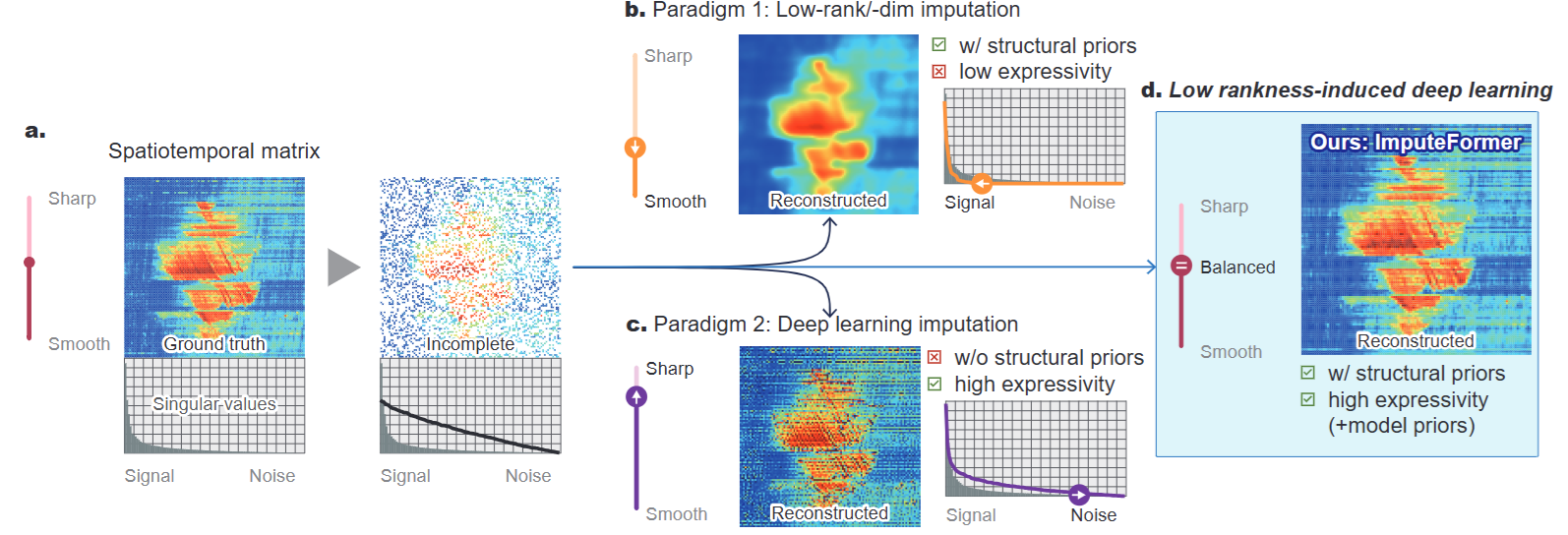
Spatiotemporal Learning
This direction focuses on learning from sparse, noisy, and incomplete observations in city-scale systems. I develop models that combine low-rank structure, graph inductive bias, Transformers, and implicit neural representations for estimation, imputation, and forecasting.
- ImputeFormer: low-rankness-induced Transformers for generalizable spatiotemporal imputation.
- STINR and MetaINR: implicit neural representations for continuous and cross-city urban time series learning.
- Tensor4Kriging, GNN4Flow, and LRTC: sparse sensing and traffic state estimation.
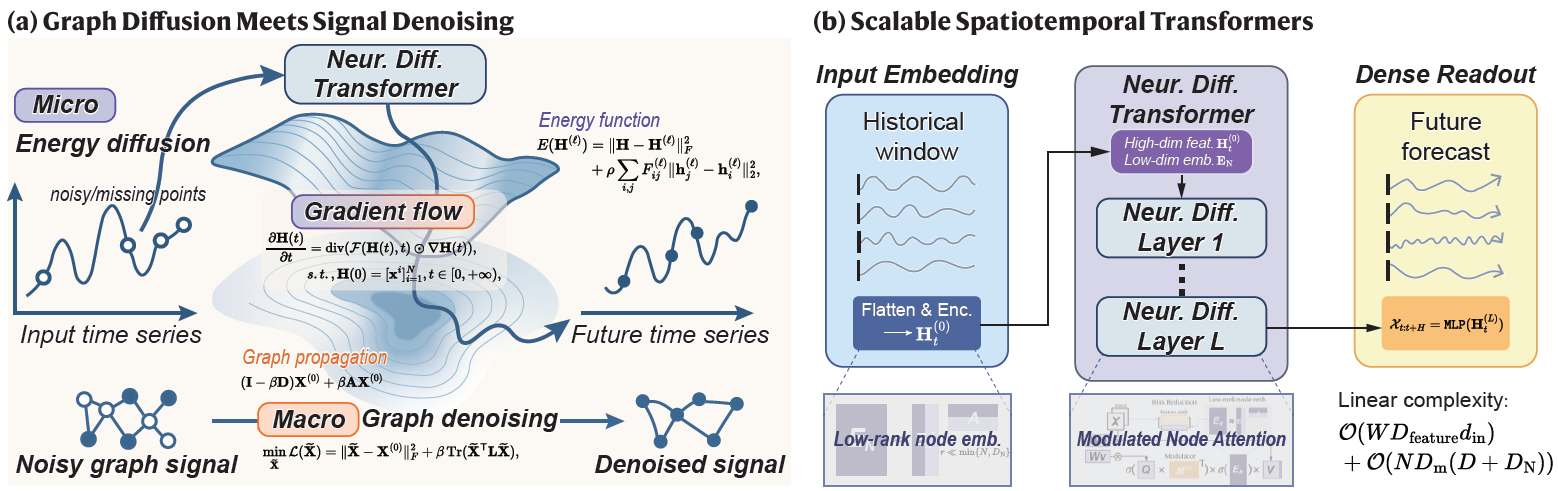
Urban AI and Scalable Forecasting
I also work on efficient and interpretable modeling for large-scale urban dynamics. This line emphasizes scalable architectures, physical or structural priors, and transferable models that remain practical under real city data constraints.
- Energy-informed graph neural diffusion: interpretable neural diffusion for large-scale urban networks.
- ST-MLP-Mixer: contextualized MLP-Mixers for large-scale traffic forecasting.
- C-LoRA: channel-aware low-rank adaptation for time series forecasting.
- LLM4Delivery: joint estimation and prediction of city-wide delivery demand.