Tong Nie
Ph.D. candidate at The Hong Kong Polytechnic University and Tongji University

Mobility AI researcher building robust, aligned, and human-centered transportation intelligence.
Hi, I am Tong Nie, a fourth-year Ph.D. student jointly at The Hong Kong Polytechnic University and Tongji University, advised by Prof. Jian Sun and Prof. Wei Ma. My doctoral research has been supported by the PolyU Presidential PhD Fellowship Scheme and the National Natural Science Foundation of China.
My research develops learning-based methods for transportation systems, with a current focus on safe autonomous driving, adversarial scenario generation, spatiotemporal modeling, and LLM/agent-based decision support. I like problems where models must do more than fit data: they need to reason under distribution shift, expose failure modes, and remain useful in safety-critical systems.
At the micro scale, I study how to reconstruct, generate, and optimize realistic and adversarial traffic scenarios for end-to-end autonomous driving. Recent directions include preference-aligned adversarial generation, closed-loop min-max training, learnability-guided curricula, and self-improving LLM agents.
At the macro scale, I work on spatiotemporal intelligence for urban systems, including sparse sensing, traffic data imputation, large-scale forecasting, implicit neural representations, and transferable models enhanced by language and graph structure.
I am also broadly interested in geospatial AI, urban computing, sustainability science, and AI for social good. I am always happy to talk about research ideas, collaborations, and ambitious systems that make transportation safer and more intelligent.
news
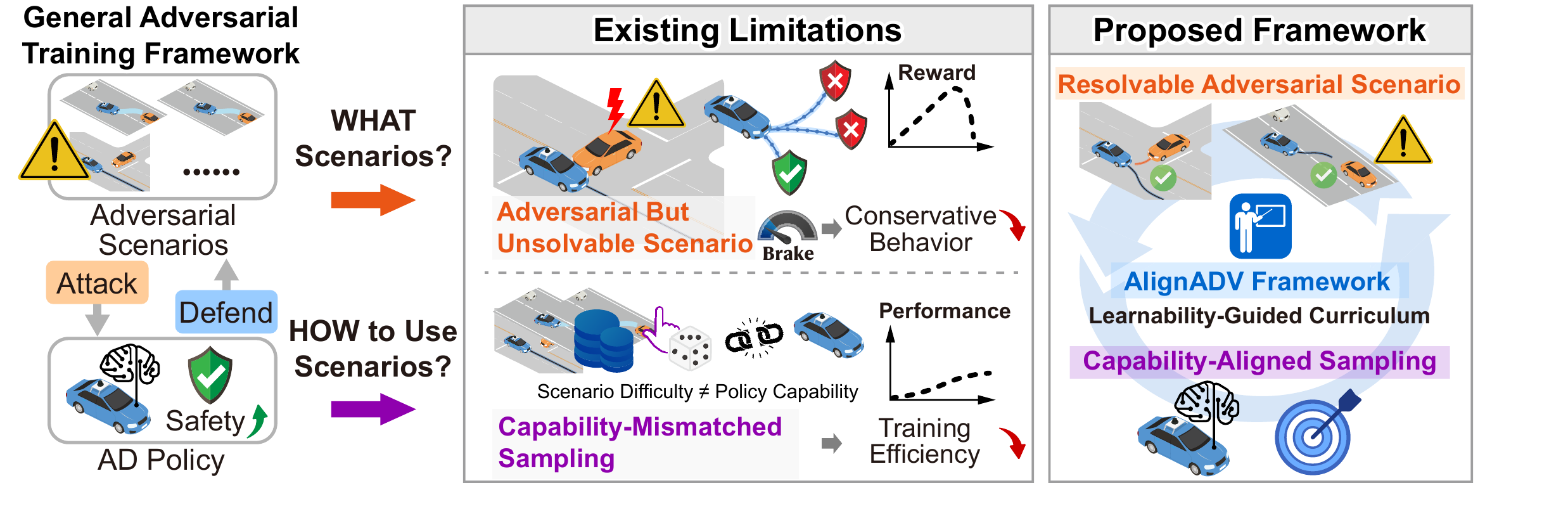
| Jun 11, 2026 | 📄 Our new preprint From Attacks to Curricula: Learnability-Guided Adversarial Training for Safe Autonomous Driving is available on arXiv. |
|---|---|
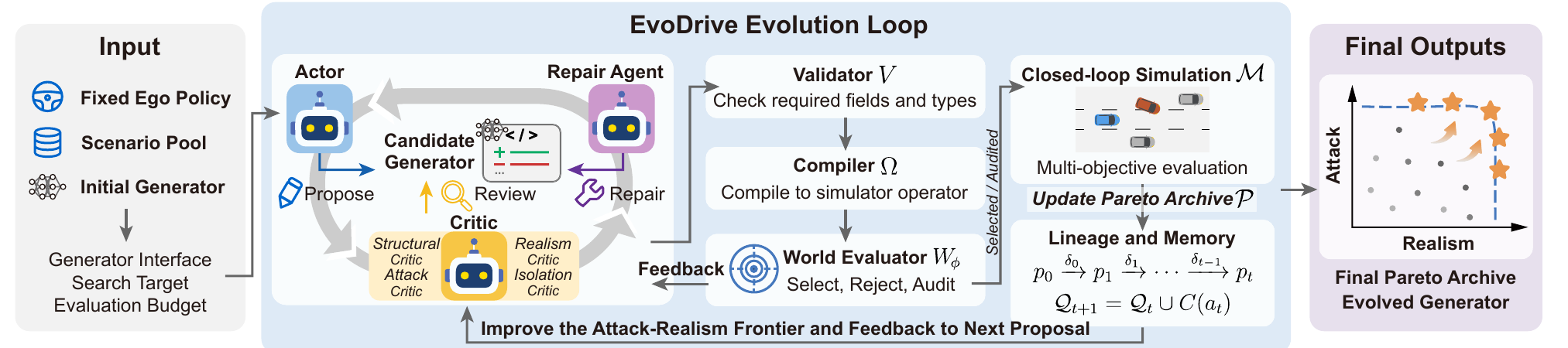
| Jun 01, 2026 | 📄 Our preprint EvoDrive: Pareto Evolution for Safety-Critical Autonomous Driving via Self-Improving LLM Agents is available on arXiv. |
| May 31, 2026 | 📄 Our preprint MobEvolve: An Agentic Self-Evolving Heuristic System for Interpretable Human Mobility Generation is available on arXiv. |
| May 19, 2026 | ✈️ Our collaborative work LLMSynthor: Macro-Aligned Micro-Records Synthesis with Large Language Models has been accepted by KDD 2026. |
| Apr 24, 2026 | ✈️ I attended ICLR 2026 in Rio de Janeiro, met new friends, and learned a lot from the community. |
| Apr 09, 2026 | 🤝 Our collaborative work Reasoning-preserved Efficient Distillation of Large Language Models via Activation-aware Initialization has been accepted by ICML 2026. |
| Mar 29, 2026 | 🏆 I was honored to receive the PolyU Best RPG Student of the Year Award 2025. |
selected publications
- From Attacks to Curricula: Learnability-Guided Adversarial Training for Safe Autonomous DrivingarXiv preprint arXiv:2606.14032, 2026TL;DR: Turns adversarial attacks into learnability-guided curricula so autonomous driving policies train on hard but useful scenarios for safer closed-loop robustness.
- EvoDrive: Pareto Evolution for Safety-Critical Autonomous Driving via Self-Improving LLM AgentsarXiv preprint arXiv:2606.03678, 2026TL;DR: Uses self-improving LLM agents and Pareto evolution to search safety-critical driving scenarios that balance attack strength, realism, and diversity.
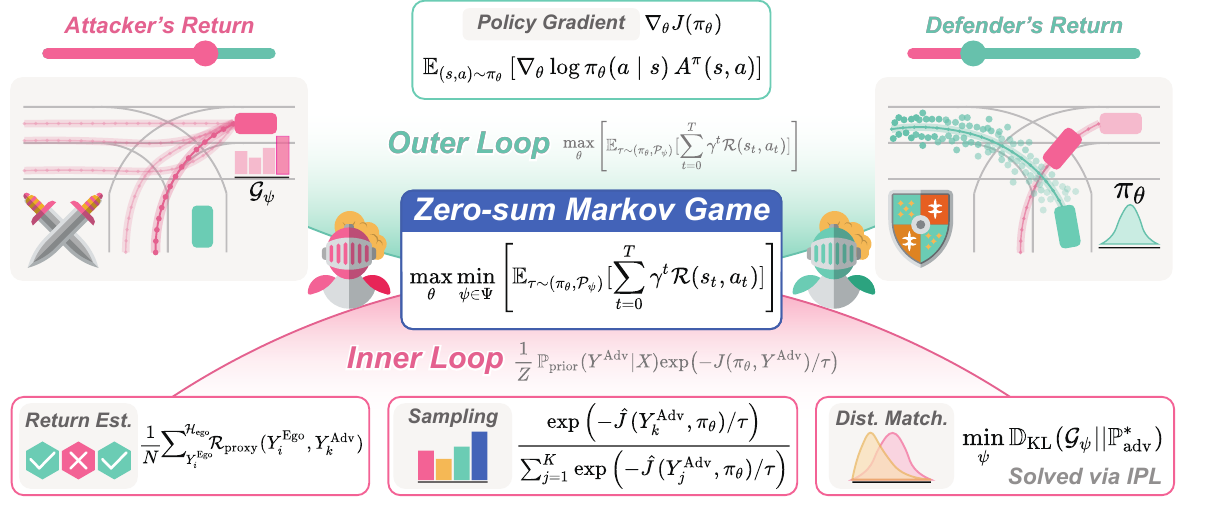
- ADV-0: Closed-Loop Min-Max Adversarial Training for Long-Tail Robustness in Autonomous DrivingarXiv preprint arXiv:2603.15221, 2026TL;DR: Formulates closed-loop adversarial training as a min-max game to improve long-tail robustness against rare but safety-critical autonomous driving scenarios.
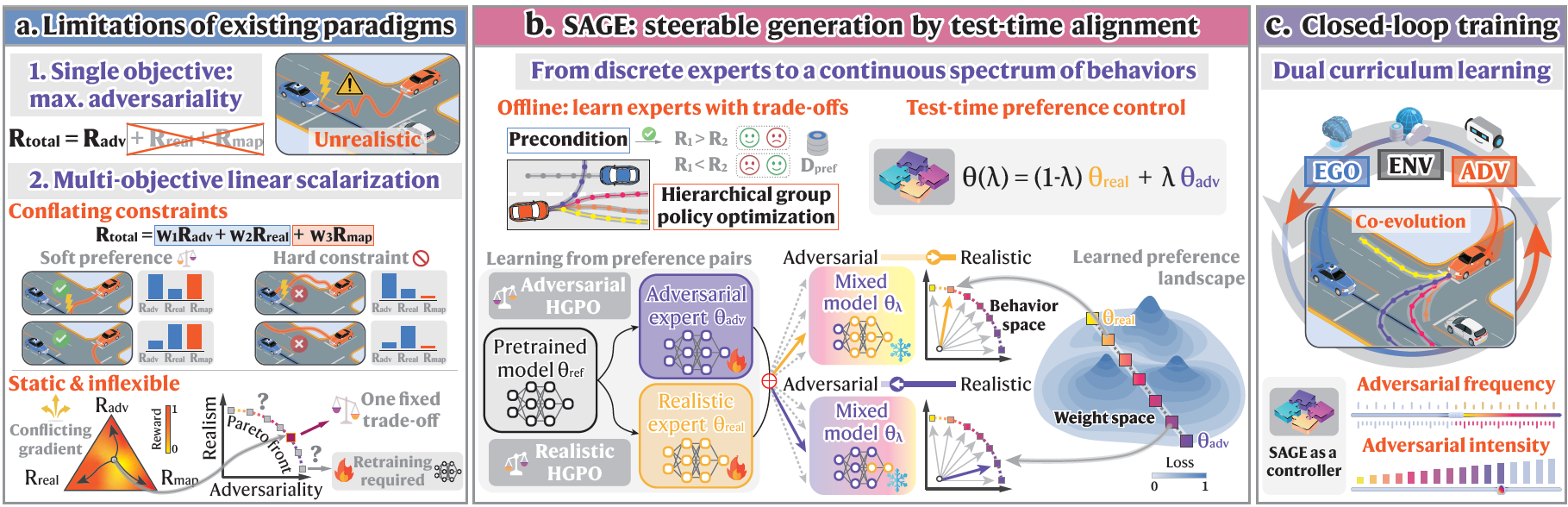
- Steerable Adversarial Scenario Generation through Test-Time Preference AlignmentIn International Conference on Learning Representations, 2026TL;DR: Aligns adversarial scenario generation with test-time preferences, enabling steerable driving tests that remain realistic while exposing targeted failures.
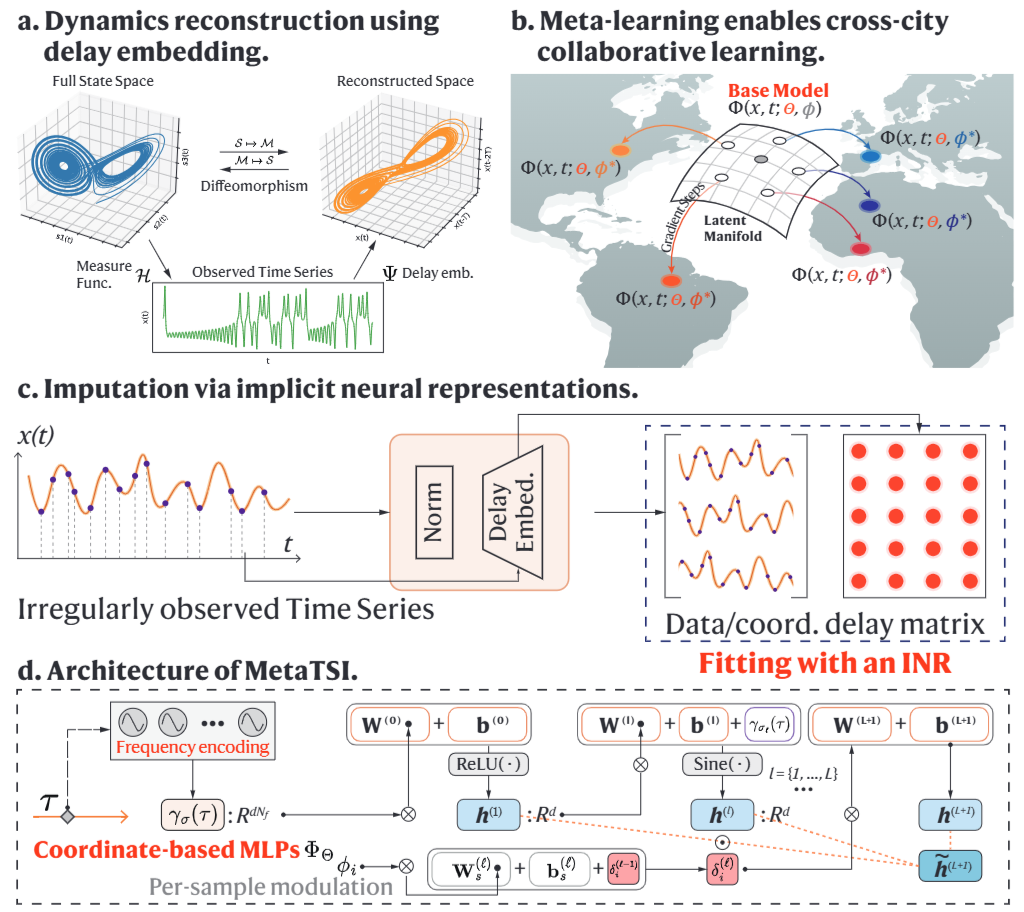
- Collaborative Imputation of Urban Time Series through Cross-City Meta-LearningIEEE Transactions on Knowledge and Data Engineering, 2026TL;DR: Learns cross-city meta-initializations for implicit neural representations, enabling collaborative imputation of urban time series with limited target-city data.
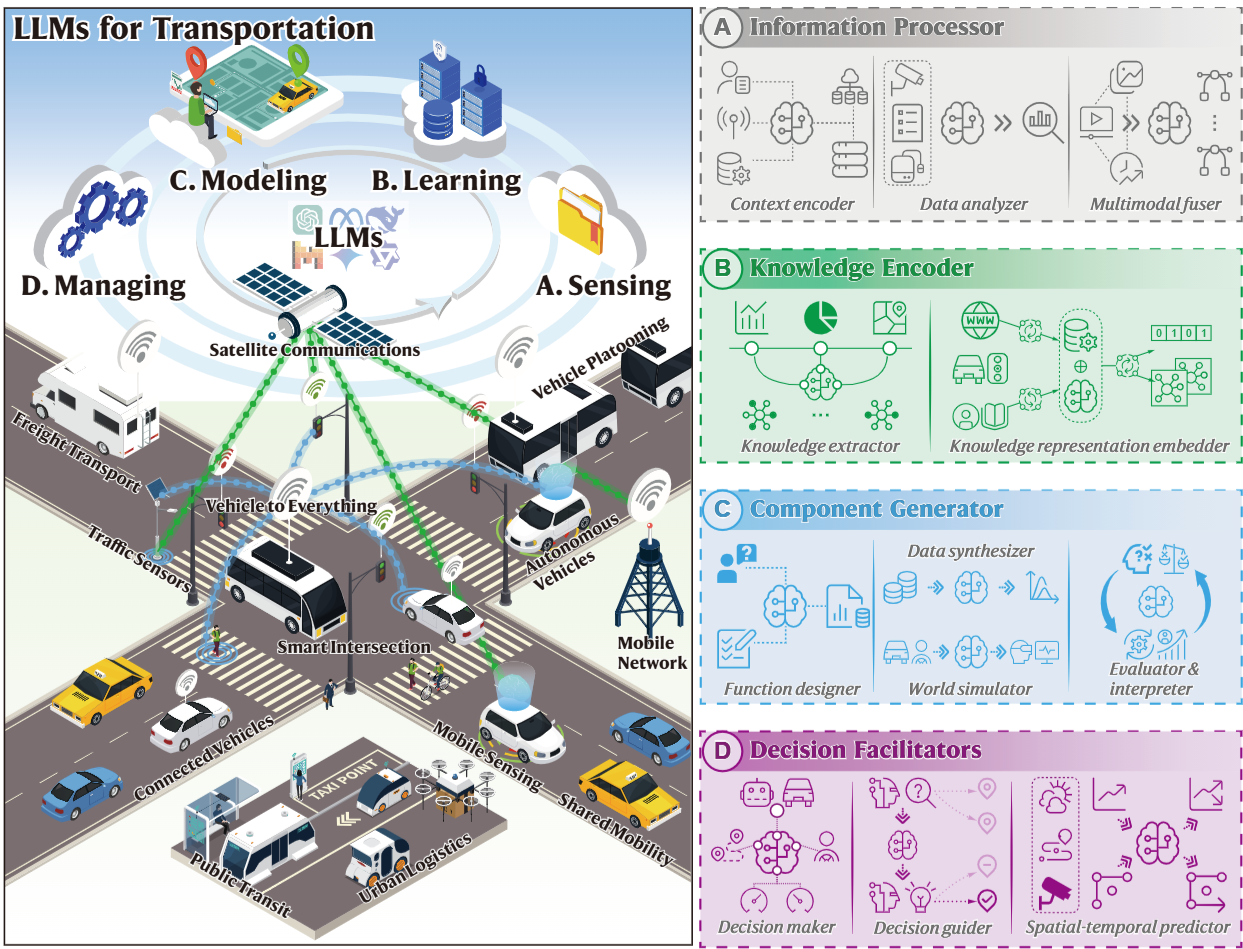
- Exploring the Roles of Large Language Models in Reshaping Transportation Systems: A Survey, Framework, and RoadmapArtificial Intelligence for Transportation, 2025TL;DR: Surveys how LLMs can reshape transportation sensing, modeling, management, and decision support, with a framework and roadmap for the field.
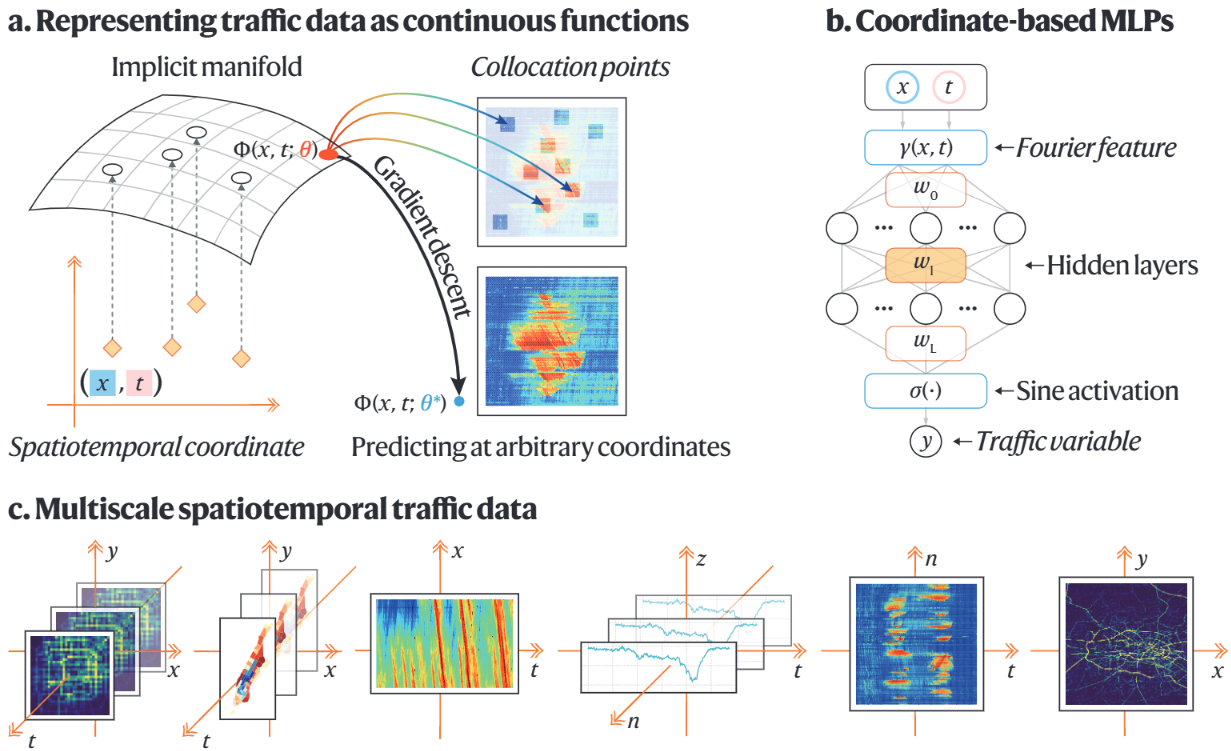
- Spatiotemporal Implicit Neural Representation as a Generalized Traffic Data LearnerTransportation Research Part C: Emerging Technologies, 2024TL;DR: Represents traffic dynamics as continuous implicit neural functions, creating a generalized learner for sparse, irregular, and multi-resolution traffic data.
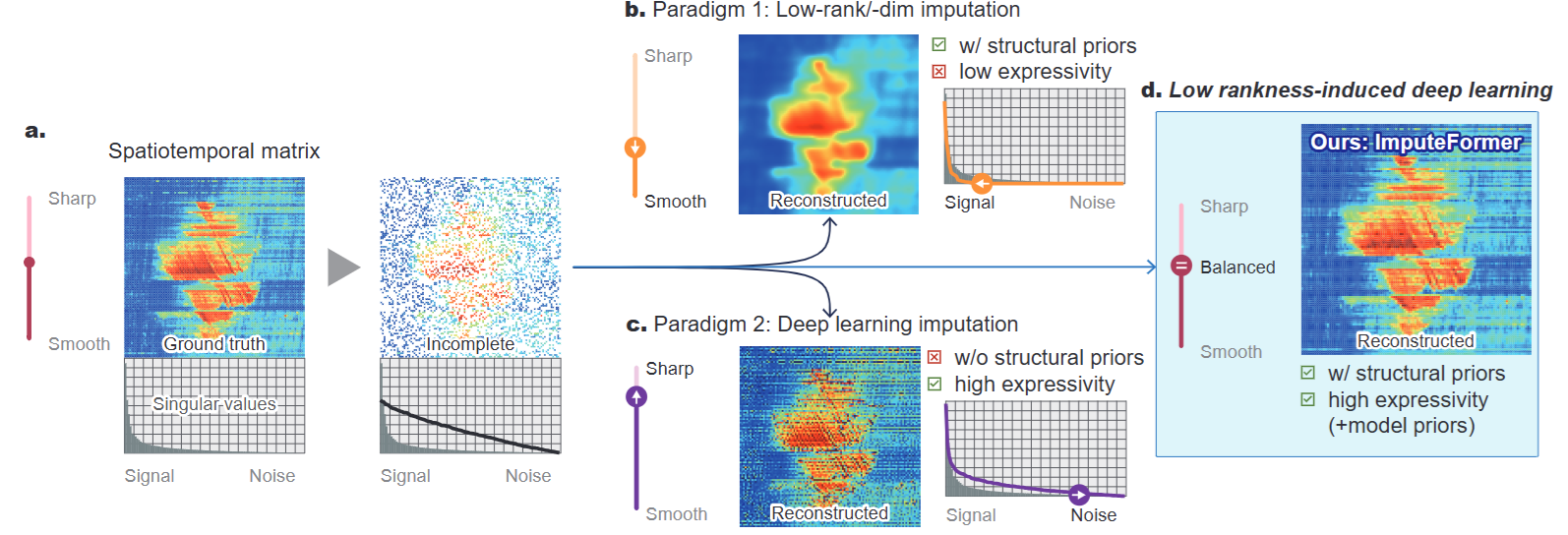
- ImputeFormer: Low Rankness-Induced Transformers for Generalizable Spatiotemporal ImputationIn ACM SIGKDD Conference on Knowledge Discovery and Data Mining, 2024TL;DR: Injects low-rank structure into Transformers for generalizable and efficient spatiotemporal imputation under diverse missing patterns.